Ziniu Wu


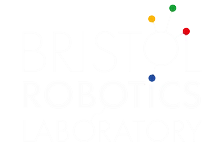
👋 Hi there! My name is Ziniu WU. I am a Postgraduate Researcher in Robotics at the University of Bristol. I am a part of the Aerial Robotics Group, Bristol Flight Lab and Bristol Robotics Laboratory. I am co-supervised by Dr. Bahadir Kocer and Prof. Arthur Richards. My research focuses on continual learning for dynamical systems to enhance their adaptation and robustness in unconstructed and dynamic environments.
{kind=link}
Prior to my PhD, I completed Research Internships in Robot Learning at the Shanghai AI Laboratory and Xi’an Jiaotong-Liverpool University. I hold an MSc in Robotics from the University of Bristol, and a BSc in Applied Mathematics jointly awarded by from the University of Liverpool and Xi’an Jiaotong-Liverpool University.
💡 Please do not hesitate to reach out to me for a coffee chat!
📰 News
| [2026-03] | 🍻 Cross-sector Aerial Robotics Workshop has been held at QMUL! | [2025-08] | 🎉 FastUMI has been accepted by CoRL 2025! |
| [2025-07] | 🍻 Teaching Robotics with ROS 2 has been accepted by ROSCon UK 2025! |
| [2025-06] | 🎉 One paper has been accepted by IROS 2025! |
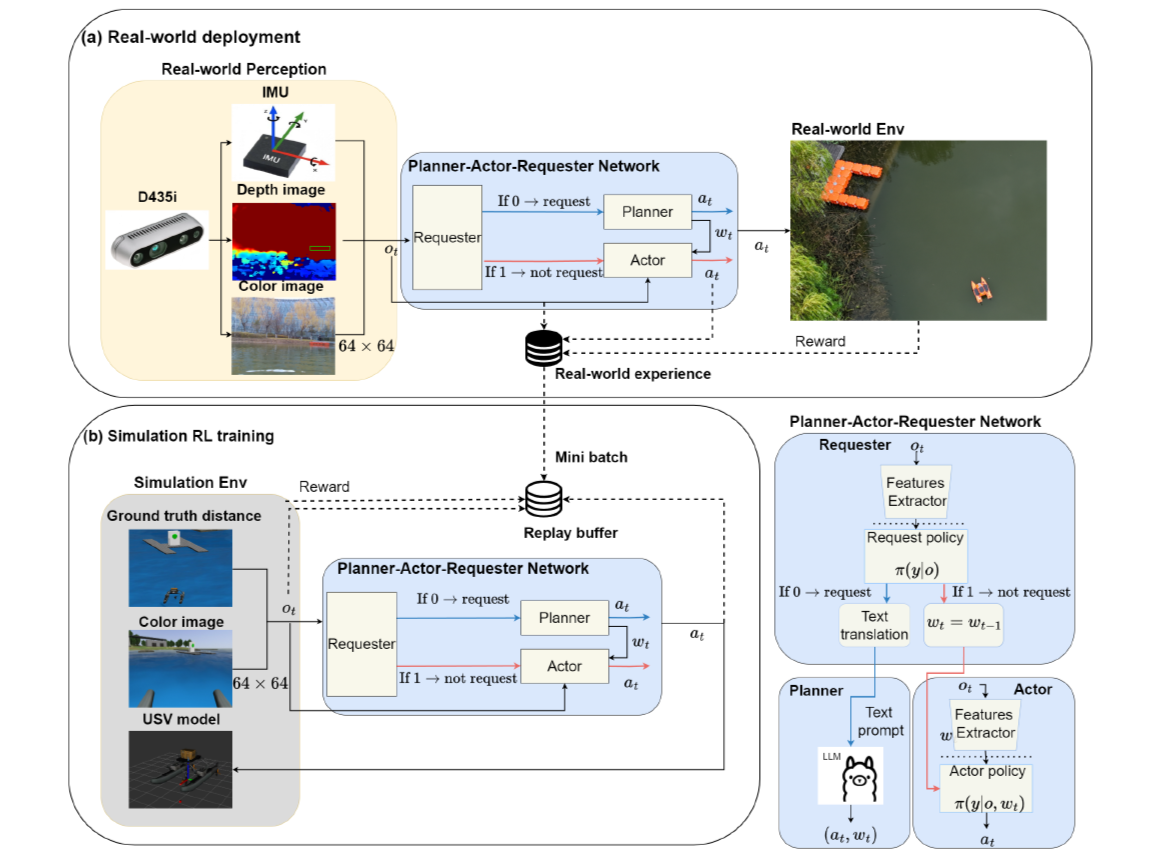
| [2025-05] | 🎉 One paper has been accepted by Ocean Engineering! |
| [2025-02] | 🎉 LLM4SAC has been accepted by Ocean Engineering! |
| [2025-01] | 🎉 AlignBot has been accepted by ICRA 2025! |
🤖 Research Interests
Robotics, Machine Intelligence, Robot Learning, Continual Learning, Motion Planning
🗂️ Publications
-
 Preprint
Preprint
-
 Preprint
Preprint
-
 CoRL
Conference on Robot Learning (CoRL), 2025.
CoRL
Conference on Robot Learning (CoRL), 2025.
-
 IROS
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025.
IROS
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025.
-
 OceanEng
OceanEng
-
 OceanEng
Ocean Engineering, 2025.
OceanEng
Ocean Engineering, 2025.
-
 ICRA
IEEE International Conference on Robotics & Automation (ICRA), 2025.
ICRA
IEEE International Conference on Robotics & Automation (ICRA), 2025.
-
 ICAC
IEEE International Conference on Automation and Computing (ICAC), 2024.
ICAC
IEEE International Conference on Automation and Computing (ICAC), 2024.
-
 RAM
IEEE Robotics & Automation Magazine (RAM), 2024.
RAM
IEEE Robotics & Automation Magazine (RAM), 2024.
†: equal contribution. *: corresponding author.
✍️ Mentoring & Teaching
- Aerial Robotics Dissertation [MSc]
- Robotics Dissertation [MSc]
- Group Project in Aerial Robotics [MSc]
- Research Project 3 [Undergraduate]
🔎 Professional Activities
- Co-organizer, Teaching Robotics with ROS 2 Workshop, ROSCon UK, 2025
- Reviewer,
IEEE International Conference on Intelligent Robots and Systems (IROS)
Powered by Jekyll and Minimal Light theme.